MPLCMASK
Cloud mask from Micropulse Lidar
Baseline VAP
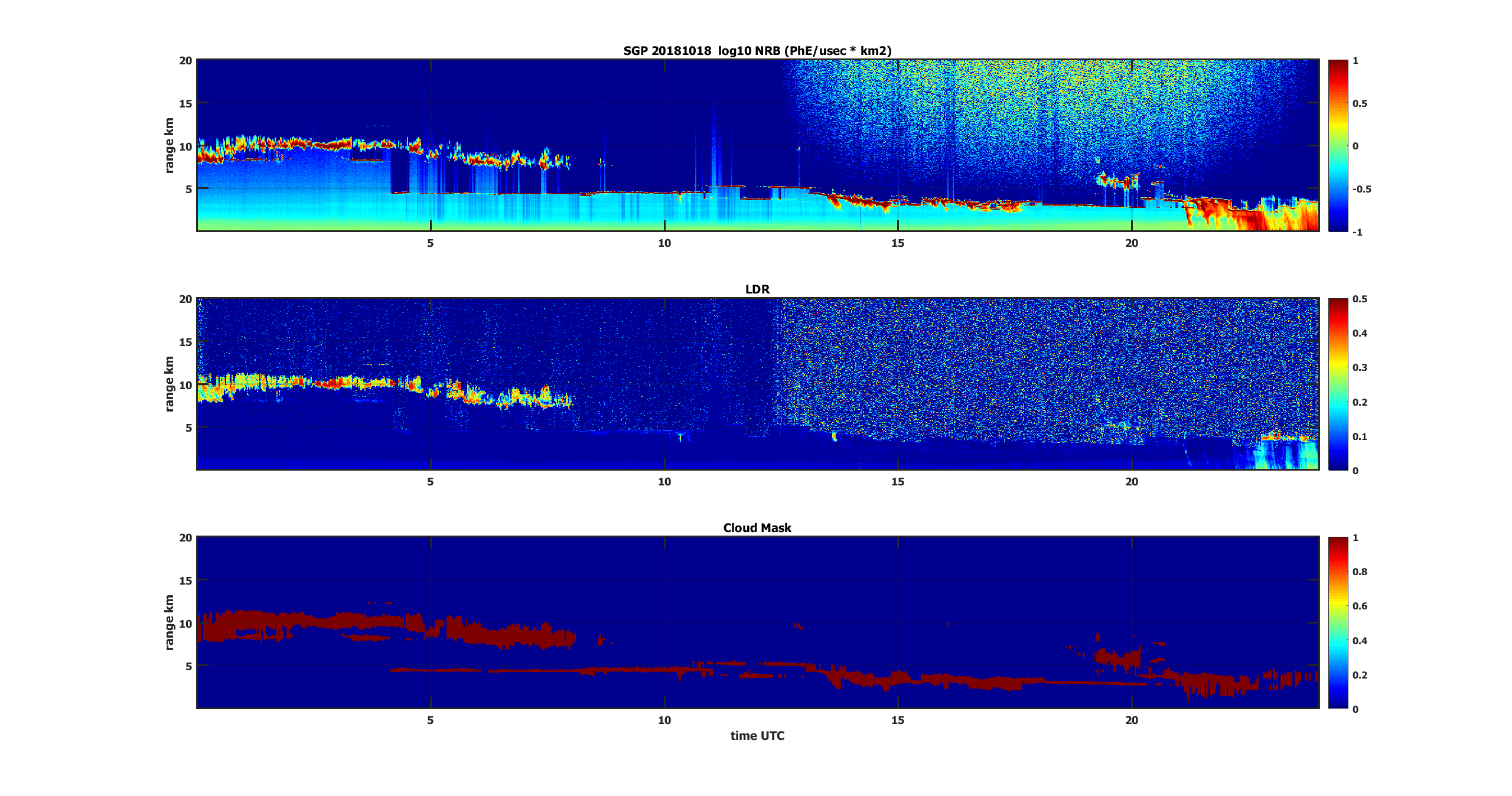
The MPLCMASK value-added product (VAP) implements a cloud detection algorithm to provide cloud boundaries from the ARM micropulse lidar (MPL) systems. The VAP provides the number of cloud layers as well as each layer’s cloud top and cloud base at 30-meter and 30-second resolution. A cloud mask is compiled at this temporal and spatial resolution and is the primary lidar cloud mask for input to the Active Remote Sensing of Clouds (ARSCL) VAP.
In addition to retrieving cloud boundaries, MPLCMASK applies instrument corrections to the lidar measurements and calculates the linear depolarization ratio (LDR) using the methodology developed by Flynn et al. (2007). The current version of MPLCMASK applies the instrument corrections as described in Campbell et al. (2002) with modifications specific to a polarized fast-switch MPL system.
Primary Derived Measurements
Contact
View all contacts-
Damao ZhangTranslator Pacific Northwest National Laboratory
Related Data Announcements
References
View all references- Riot‐Bretêcher et al. "Strengthening Atmospheric Greenhouse Effect at the Arctic North Slope of Alaska Site Evidenced by Long‐Term Records of the Downwelling Longwave Radiance Spectrum". 2025. 10.1029/2025JD043680.
Locations
Follow Us:



Keep up with the Atmospheric Observer
Updates on ARM news, events, and opportunities delivered to your inbox
ARM User Profile
ARM welcomes users from all institutions and nations. A free ARM user account is needed to access ARM data.